AUTOMOTIVE CONTROLS
LABORATORY
Vehicular Safety Systems
We work on the design and development of Wheel Slip Regulation systems and Fault Diagnosis systems for Heavy Commercial Vehicles. Wheel Slip Regulation is achieved through 2 different model-based strategies: Sliding Mode Control (SMC), and Model Predictive Control (MPC). Fault Diagnostic schemes are developed using Machine Learning.
You can read on to find out more about these projects below.

WSR through Sliding Mode Control (SMC)
The problem of WSR is complex and highly non-linear. SMC is a non-linear control technique that is widely adopted for slip control due to its robustness to external disturbances and faster response.
In this work, a sliding mode controller is being developed for WSR of heavy vehicles. The controller considers longitudinal vehicle dynamics and brake actuator dynamics. Further, yaw stability control through SMC is also being developed.
This work was pursued by Nithya Sridhar, MS Scholar (graduated) and is currently being pursued by Harshal Patil, MS Scholar.
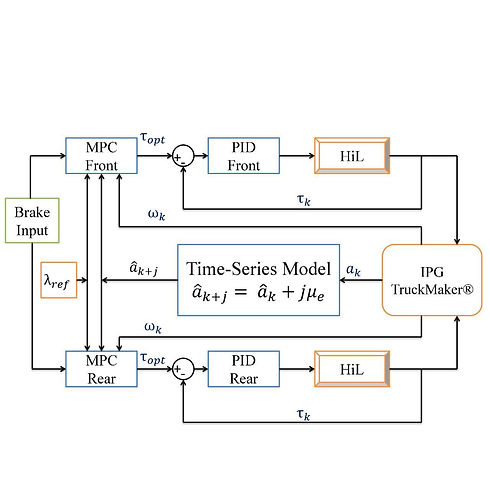
WSR through Model Predictive Control (MPC)
MPC uses a mathematical model of the system, to be controlled, for predicting into future and deciding an optimal set of control moves. MPC can handle constraints in an elegant and systematic manner owing to the nature of the optimization problem.
A wheel slip prediction model was developed considering measurements from wheel speed sensors and accelerometer. Longitudinal vehicle acceleration was modelled using Auto-Regressive (AR) time series model. This converted the slip control problem into a univariate control input problem. This allowed for an analytical solution to the MPC optimization problem.
This work is being pursued by Pavel, Project Officer.

Fault Diagnosis and Prognosis of Air brake system
The main objective of this research is to develop a fault diagnosis and prognosis scheme for air brake system in HCRVs. Machine learning techniques like Artificial Neural Network and Support Vector Machines were used for the developing the fault diagnostic scheme. This scheme would essentially help the driver to get a tactile feed back regarding the brake condition of vehicle. In addition to this, a yaw angle controller was also developed to maintain the vehicle yaw stability with faulty brake conditions.
This work is currently being pursued by Radhika R., PhD scholar.